TOMOGRAFÍA COMPUTARIZADA HELICOIDAL MULTICORTE
ESTUDIANTE: Enma luz Sosa Paucar.
CARRERA: Tecnología Medica.
ESPECIALIDAD: Radiología.
CICLO: IV
TEMA: TOMOGRAFIA T
EVIDENCIA: Clases teóricos y practicas
REFLEXIÓN META COGNITIVA EN TORNO A LO QUE APRENDÍ, COMO LO APRENDÍ Y PARA QUE ME SERVIRÁ.
En esta clase comprendí que el sistema de imagen de tomografía computarizada (TC) es revolucionario. No hay un receptor de imagen convencional, como una película o un tubo intensificador de imágenes. Un haz de rayos X bien colimado se dirige al paciente y la radiación atenuada que formará la imagen es medida por un receptor cuya respuesta se transmite a un ordenador. Tras analizar la señal del receptor, el ordenador reconstruye la imagen y la muestra en un monitor. La reconstrucción de la sección anatómica en el ordenador se consigue mediante ecuaciones matemáticas (algoritmos) adaptadas para procesos informatizados.
La TC helicoidal ha emergido como una herramienta de diagnóstico nueva y mejorada que proporciona mayores imágenes de partes anatómicas que presentan dificultades debido a movimientos respiratorios. La TC helicoidal es particularmente adecuada para el tórax, el abdomen y la pelvis. También puede registrar imágenes transversales convencionales en regiones del cuerpo donde el movimiento no es un problema, como la cabeza, la columna vertebral o las extremidades.
Para poder aprender esto, a pesar de las clases teóricas y practicas, sera de gran ayuda el poder por lo meno conocer las partes mas importantes y aprendamos a operar este equipo.
En la futura vida profesional, lo que ahora aprendí, me servirá para diagnosticar a obtener información del paciente en forma de cortes y así ser una ayuda eficaz para los médicos radiologías
Principios
Al estudiar el abdomen mediante técnicas radiológicas convencionales, la imagen se crea directamente en la película receptora de la imagen y muestra un contraste bajo, sobre todo a causa de la radiación dispersa. La imagen también está degradada por la superposición de todas las estructuras anatómicas del abdomen. Para visualizar mejor una estructura abdominal, se puede utilizar la tomografía convencional. En la nefrotomografía el contorno renal es visible porque los tejidos subyacentes y suprayacentes son borrosos. Además, el contraste de las estructuras enfocadas
está realzado. Sin embargo, la imagen todavía es bastante deslustrada y borrosa.
La tomografía convencional se llama tomografía axial porque el plano de la imagen es paralelo al eje longitudinal del cuerpo y proporciona imágenes sagitales y coronales. Una imagen de TC es una imagen transaxial o transversa, perpendicular al eje longitudinal del cuerpo. El método transversal preciso por el que un sistema de imagen transversal produce una imagen de sección es extremadamente complicado; de hecho, su comprensión requiere conocimientos avanzados de ingeniería, física y computación. Sin embargo, los principios básicos pueden ponerse de manifiesto si uno considera el principio más simple de los sistemas de TC, que consiste en un haz de rayos X finamente colimado y un detector único. La fuente de rayos X y el detector están conectados de forma que se mueven de forma sincrónica.
Cuando el complejo fuente-detector realiza un barrido o traslación sobre el paciente, las estructuras internas del organismo atenúan el haz de rayos X en relación a la densidad de su masa y a su número atómico efectivo. La intensidad de la radiación detectada varía en relación a este patrón de atenuación y forma un perfil de intensidad o proyección.
Al final el complejo fuente-detector regresa a su posición inicial y todo el complejo gira y comienza
una segunda traslación. Durante la segunda traslación, la señal del detector será otra vez proporcional a la atenuación de las estructuras anatómicas del haz de rayos X y se creará una segunda proyección.
Si este proceso se repite muchas veces se genera un gran número de proyecciones que no se muestran visualmente, pero que se almacenan en formato digital en el ordenador.
El procesado informático de estas proyecciones conlleva la superposición efectiva de cada proyección para reconstruir una imagen de las estructuras anatómicas de esa sección. La señal del detector durante cada traslación tiene un intervalo dinámico de 12 bits (4.096 niveles de gris). El valor de cada incremento está relacionado con el coeficiente de atenuación de toda la trayectoria de los rayos X a través del tejido. Mediante ecuaciones simultáneas se obtiene una matriz de valores que representa la sección anatómica.

Sistema de obtención de imágenes
Se debe identificar tres componentes principales en los sistemas de imagen de TC: el cabezal (gantry), el ordenador y la consola de control. Cada uno de estos componentes principales tiene varios subsistemas.

Consola de control
Los sistemas de imagen de TC pueden estar equipados con dos o tres consolas. Una consola la utiliza el radiólogo para hacer funcionar el sistema. Otra consola puede servir para realizar el posprocesado de la imagen para fotografiar y clasificar. Una tercer consola puede servir para que el médico vea las imágenes y manipule el contraste de la imagen, el tamaño y la apariencia visual general.
La consola de trabajo contiene contadores y controles para seleccionar las características técnicas de la imagen, el movimiento mecánico del cabezal y de la camilla del paciente, y los controles del ordenador, permitiendo la reconstrucción de la imagen y la transmisión. La consola de visualización del médico acepta la imagen reconstruida de la consola de trabajo y la muestra para su visualización y
diagnóstico.Una consola de trabajo suele tener controles y monitores para diferentes factores técnicos. Habitualmente se trabaja por encima de los 120 kVp. El mA máximo suele ser de 400 mA y se modula durante la obtenció de imágenes según el grosor del paciente para minimizar la dosis. Los espesores nominales van de 0,5 a 5 mm. El espesor de sección se selecciona desde la consola mediante el ajuste automático del colimador y por selección de varias filas del ensamblado del detector. También se dispone de controles para el movimiento automático y la indexación de la camilla de exploración del paciente. Esto permite programar la localización del eje Z, del volumen de tejido del que obtener imágenes y del factor de desplazamiento (pitch) helicoidal.
La consola de control tiene habitualmente dos monitores. Uno permite al operador anotar los datos del paciente en la imagen. E segundo monitor le permite ver al operador la imagen resultante antes de transferirla a una placa radiográfica o a la consola de visualización del médico.
Terminal de trabajo del médico
Esta consola permite al médico recuperar cualquier imagen previa y manipularla para optimizar la información diagnóstica. Los controles permiten manipular los ajustes de brillo y contraste, las técnicas de magnificación, la visualización de áreas de interés (ROI, regions of interest) y la utilización en línea de programas informáticos.
Ordenador
El ordenador es un subsistema único en el sistema de imagen de TC. Según el formato de la imagen, se deben resolver simultáneamente hasta 250.000 ecuaciones; por ello se requiere una gran capacidad de computación. El microprocesador y la memoria principal están en el corazón del ordenador utilizado en la TC. Éstos determinan el tiempo entre el final de la obtención y la aparición de una imagen, llamado tiempo de reconstrucción. La eficacia de un examen está determinada en gran manera por el tiempo de reconstrucción, especialmente cuando se obtiene un gran número de imágenes.
Muchos sistemas de imagen de TC utilizan un conjunto de procesadores en lugar de un microprocesador para la reconstrucción de la imagen. El conjunto de procesadores realiza muchos cálculos de forma simultánea y por ello es significativamente más rápido que el microprocesador.
Cabezal
El cabezal (gantry o pórtico) consta del tubo de rayos X, los detectores, el generador de alto voltaje, la mesa de soporte para el paciente y el soporte mecánico para cada uno de ellos. Estos subsistemas reciben órdenes electrónicas de la consola de control y transmiten datos al ordenador para la producción de la imagen y el posprocesado.
Los tubos de rayos X utilizados en la TC helicoidal multicorte tienen requerimientos especiales. La TC helicoidal multicorte comporta una considerable demanda térmica en el tubo de rayos X. Éste puede activarse durante 60s continuamente. Aunque algunos tubos de rayos X funcionan a una corriente relativamente baja, en muchos la capacidad de potencia instantánea debe ser alta.
La mayoría utilizan rotores de alta velocidad para disipar mejor el calor. El fallo en el tubo de rayos X es la principal causa de avería de los sistemas de imagen de TC y su principal limitación en la frecuencia secuencial de imágenes. El tamaño de la mancha focal también es importante en la mayoría de diseños, a pesar de que la imagen no se base en el principio de la proyección directa. Los sistemas de imagen de TC diseñados para obtener imágenes de alta resolución espacial incorporan tubos de rayos X con una mancha focal pequeña.
Los tubos de rayos X de la TC helicoidal multicorte son muy grandes. Tienen una capacidad de conservación de calor en el ánodo de aproximadamente 8 MUC o superior. Tienen velocidades de enfriamiento en el ánodo de alrededor de 1 MUC por minuto porque el disco del ánodo tiene un diámetro mayor y es más grueso, por tanto tiene una masa también mucho mayor. Las características limitantes son el diseño del punto focal y la disipación de calor. El pequeño punto focal debe tener un diseño especialmente sólido. Los fabricantes diseñan algoritmos de enfriamiento del punto focal para predecir el estado térmico de dicho punto y ajustar el parámetro mA en consecuencia.
Una empresa ha fabricado un tubo de rayos X revolucionario en el que todo el inserto rota en un baño de aceite durante una exposición. El haz de electrones se deflexiona en el ánodo en un proceso similar al observado en un tubo de rayos catódico (CRT). El resultado es que puede soportar hasta 30 millones de unidades de calor y se enfría a una velocidad de 5 millones de unidades de calor por minuto.
Los sistemas de TC helicoidal multicorte tienen múltiples detectores ordenados de forma que los números llegan a decenas de miles. Antes se usaban detectores llenos de gas, pero ahora todos son detectores en estado sólido de centelleo. Los primeros conjuntos de detectores de centelleo contenían
cristales-fotomultiplicadores de centelleo ensamblados en un tubo. Estos detectores no se podían alinear muy cerca unos de otros y requerían una fuente de alimentación para cada tubo fotomultiplicador. Por ello fueron reemplazados por ensamblajes de cristales-fotodiodo de centelleo.
Los fotodiodos convierten la luz en señal electrónica. Son más pequeños y más baratos, y además no requieren una fuente de alimentación adicional. El yoduro sódico (NaI) fue el cristal utilizado en los primeros sistemas de imagen. Rápidamente se reemplazó por el germanato de bismuto (Bi4Ge3O12 o BGO) y el yoduro de cesio (CsI). El tungstato de cadmio (CdWO4) y las cerámicas especiales son los cristales más utilizados. La concentración de detectores de centelleo es una característica importante de un sistema de imagen de TC que afecta a la resolución espacial del sistema.
Los detectores de centelleo tienen una alta eficiencia para la detección de los rayos X. Aproximadamente el 90% de los rayos X incidentes en el detector se absorben y contribuyen a la señal emergente. Hoy en día es posible agrupar los detectores de modo que no quede espacio entre ellos. De este modo la eficiencia global en la detección se acerca al 90%. La eficiencia de la serie de detectores de rayos X reduce la dosis del paciente, permite un tiempo de obtención de imágenes más rápido y mejora la calidad de imagen al aumentar la relación señal-ruido. El diseño de la serie de detectores es especialmente importante en la TC helicoidal multicorte.

Tecnología de anillo deslizante
Los anillos deslizantes son dispositivos electromecánicos que conducen la electricidad y las señales eléctricas a través de anillos y cepillos de una superficie rotatoria a una superficie fija. Una superficie es un anillo liso y la otra un anillo con cepillos que barren el anillo liso. La TC helicoidal es posible gracias al uso de la tecnología de anillo deslizante, que permite que el cabezal rote continuamente, sin interrupción. Las primeras TC se realizaron con una pausa entre las rotaciones del cabezal. Durante la pausa se movía la camilla del paciente y el cabezal se rebobinaba a una posición inicial.
En un sistema de cabezal de anillo deslizante la potencia y las señales eléctricas se transmiten a través de anillos estacionarios en el cabezal, eliminando la necesidad de cables eléctricos y haciendo imposible la rotación continua.
Principios de obtención de imágenes
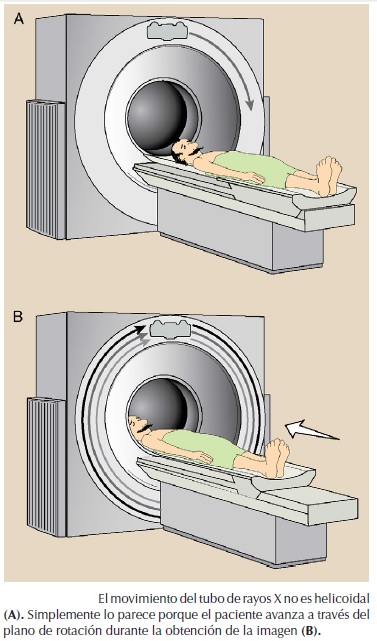
El movimiento helicoidal en la TC helicoidal no es como un muelle, cuando inicia el examen, el tubo de rayos X rota continuamente. Mientras el tubo de rayos X rota, la camilla mueve al paciente a través del plano del haz rotatorio de rayos X. El tubo de rayos X se alimenta continuamente y se registran los datos también continuamente, con lo que resulta que se puede reconstruir una imagen en cualquier posición del eje z a lo largo del paciente.
Algoritmos de interpolación
Es posible reconstruir una imagen en cualquier posición del eje z gracias a un proceso matemático llamado interpolación. Durante la TC helicoidal se reciben datos de las imágenes continuamente, cuando se reconstruye una imagen, el plano de la imagen no contiene suficientes datos para la reconstrucción. Los datos en este plano deben ser estimados por interpolación. La interpolación de datos se lleva a cabo con un programa informático especial llamado algoritmo de interpolación.
Los primeros algoritmos de interpolación usaban una interpolación lineal de 360°. El plano de la imagen reconstruida se interpolaba de datos tomados una revolución más allá.
Cuando a estas imágenes se les da el formato de vistas o secciones sagitales o coronales, puede haber una pérdida de definición en comparación a las imágenes de TC convencionales formateadas. La solución al problema de la pérdida de definición es la interpolación de valores separados por 180° (media revolución del tubo de rayos X). Esto conlleva una mejor resolución en el eje z y una mejora en las secciones reformateadas sagitales y coronales.
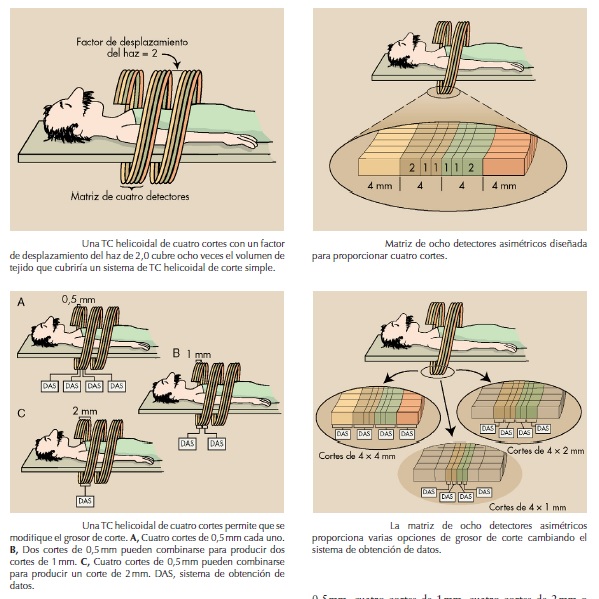
Factor de desplazamiento
Aparte de la mejora en las reconstrucciones sagitales y coronales, los algoritmos de interpolación de 180° permiten tomar imágenes con un factor de desplazamiento mayor que uno. El factor de desplazamiento helicoidal conocido (pitch) es la relación entre el movimiento de la camilla del paciente y el grosor del haz de rayos X.
El factor de desplazamiento se expresa como una relación, como por ejemplo 0,5:1, 1,0:1, 1,5:1 o 2:1. Un factor de desplazamiento de 0,5:1 ofrece imágenes solapadas y una dosis del paciente más elevada. Un factor de desplazamiento de 2:1 da como resultado una obtención de imágenes más larga y una dosis del paciente más reducida.
Un incremento del factor de desplazamiento por encima de 1:1 aumenta el volumen de tejido del cual se puede tomar una imagen en un tiempo determinado. Ésta es la ventaja principal de la TC helicoidal multicorte: su capacidad de tomar imágenes de un volumen más grande de tejido mientras el paciente aguanta la respiración una sola vez. Esto es particularmente beneficioso en la angiografía por TC, la planificación de tratamientos de radioterapia y la obtención de imágenes de pacientes no cooperadores.

Técnica de obtención de imágenes
Matriz detectora de múltiples cortes
Los sistemas de obtención de imágenes de TC tienen principalmente dos características distintivas. Por un lado, en vez de una matriz detectora, la TC de múltiples cortes requiere varias matrices detectoras paralelas que contienen miles de detectores individuales. Por otro lado, la activación de una matriz detectora tan grande para un análisis rápido de gran volumen requiere un ordenador muy rápido y de alta capacidad. Después de la demostración inicial de la obtención de imágenes con dos cortes, se han desarrollado rápidamente matrices detectoras que proporcionan hasta 320 cortes simultáneamente.
Un diseño simple de obtención de imágenes de múltiples cortes consta de cuatro matrices detectoras, todas de igual anchura. La anchura de cada matriz detectora es de 0,5 mm, lo que resulta en cuatro cortes de 0,5 mm de anchura. El diseño de un sistema de obtención de imágenes de TC de este tipo permite habitualmente que se combinen las señales detectadas de matrices adyacentes para producir dos cortes de 1 mm de anchura o un corte de 2 mm de anchura. La obtención de imágenes con un corte más ancho permite una mejor resolución de contraste para el mismo ajuste de mA, ya que la señal detectada es mayor.
Esta mejora en la resolución de contraste se acompaña de una ligera reducción de la resolución espacial debido al incremento del tamaño del vóxel. O bien se puede analizar un volumen de tejido más grande con la resolución de contraste original a un ajuste de mA menor.
Gracias, esto me ah ayudado en mis estudios de radiología
ResponderEliminarMuy buen aporte !!
ResponderEliminar